进程
源码
//process.c
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <unistd.h>
extern int create_process (char* program, char** arg_list);
int create_process (char* program, char** arg_list)
{
pid_t child_pid;
child_pid = fork ();
if (child_pid != 0)
{
return child_pid;
}
else
{
execvp (program, arg_list);
abort ();
}
}
在这里,我们创建的子程序运行了一个最最简单的命令 ls。
//createprocess.c
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <unistd.h>
extern int create_process (char* program, char** arg_list);
int main ()
{
char* arg_list[] = {
"ls",
"-l",
"/etc/yum.repos.d/",
NULL
};
create_process ("ls", arg_list);
return 0;
}
编译
CPU 看不懂源码里的函数,命令,CPU 只认二进制数据,所以源码需要翻译成01二进制数据,这个过程就是**编译(Compile)**的过程。
编译出的文件好比一个公司的项目执行计划书,你要把一个项目执行好,计划书得有章法,有一定格式。在 Linux 下,二进制程序也有这样的格式,叫ELF(Executeable and Linkable Format,可执行与可链接格式),这个格式可以根据编译的结果不同,分为不同的格式。
ELF-可重定位文件
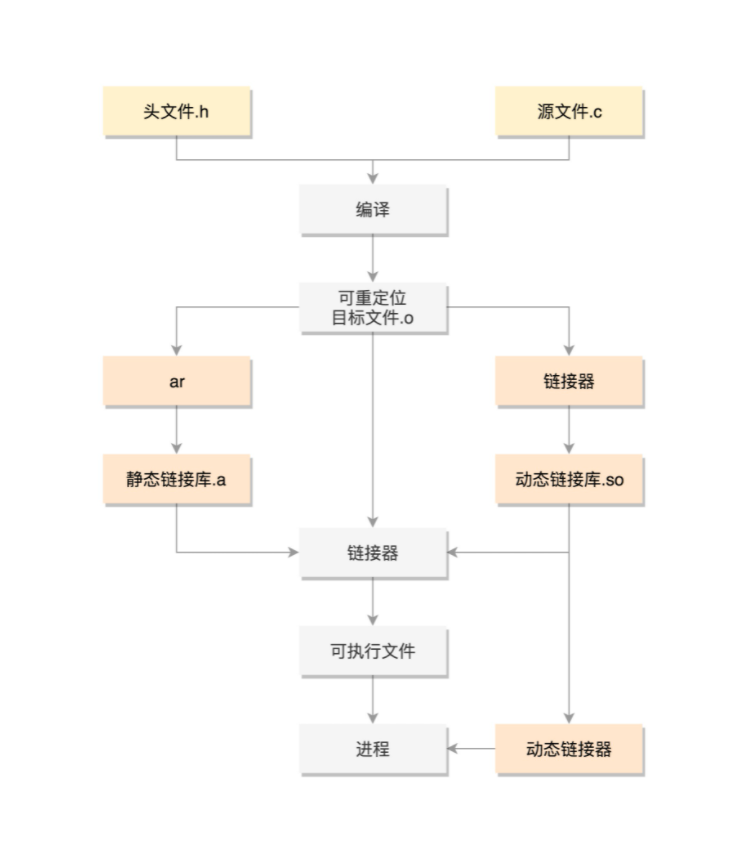
下图展示了如何从源码到二进制文件的转化
gcc -c -fPIC process.c
gcc -c -fPIC createprocess.c
-fPIC作用于编译阶段,告诉编译器产生与位置无关代码 (Position-Independent Code)。产生的代码中,没有绝对地址,全部使用相对地址,故而代码可以被加载器加载到内存的任意位置,都可以正确的执行。
在编译的时候,先做预处理工作,例如将头文件嵌入到正文中,将定义的宏展开,然后就是真正的编译过程,最终编译成为.o文件,这就是ELF的第一种类型,可重定位文件(Relocatable File)。文件格式如下,
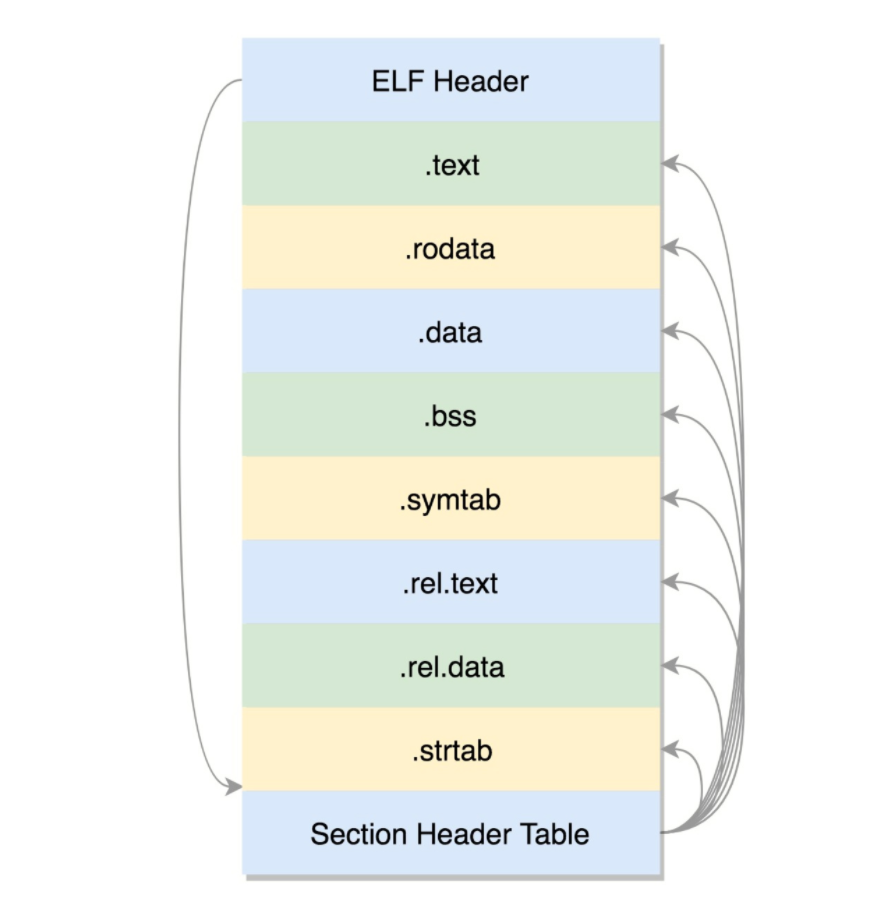
ELF 文件的头是用于描述整个文件的。这个文件格式在内核中有定义,分别为 struct elf32_hdr 和 struct elf64_hdr。
| section | 内容 |
|---|---|
| .text | 放编译好的二进制可执行代码 |
| .data | 已经初始化好的全局变量(临时变量放在栈里) |
| .rodata | 只读数据,例如字符串常量、const 的变量 |
| .bss | 未初始化全局变量,运行时会置 0 |
| .symtab | 符号表,记录的则是函数和变量 |
| .strtab | 字符串表、字符串常量和变量名 |
第一种 ELF 文件叫可重定位文件,为啥可重定位?我们可以想象一下,这个编译好的代码和变量,将来加载到内存里面的时候,都是要加载到一定位置的。比如说,调用一个函数,其实就是跳到这个函数所在的代码位置执行;再比如修改一个全局变量,也是要到变量的位置那里去修改。但是现在这个时候,还是.o文件,不是一个可以直接运行的程序,这里面只是部分代码片段。
例如这里的 create_process函数,将来被谁调用,在哪里调用都不清楚,就更别提确定位置了。所以,.o里面的位置是不确定的,但是必须是可重新定位的,因为它将来是要做函数库的嘛,就是一块砖,哪里需要哪里搬,搬到哪里就重新定位这些代码、变量的位置。
ELF-可执行文件
要让create_process这个函数作为库文件重用,需要将其形成库文件,最简单的类型是静态链接库.a文件,它将一系列.o文件归档为一个文件。使用ar命令创建.a文件。使用方法看这里。
ar cr libstaticprocess.a process.o
虽然这里 libstaticprocess.a 里面只有一个.o,但是实际情况可以有多个.o。当有程序要使用这个静态连接库的时候,会将.o 文件提取出来,链接到程序中。
gcc -o staticcreateprocess createprocess.o -L. -lstaticprocess
-L表示在当前目录下找.a文件,-lstaticprocess 会自动补全文件名,比如加前缀 lib,后缀.a,变成 libstaticprocess.a,找到这个.a文件后,将里面的 process.o 取出来,和 createprocess.o 做一个链接,形成二进制执行文件 staticcreateprocess。
在链接过程中,重定位就起作用了,在createprocess.o里调用了create_process函数,但是不能确定位置,现在将process.o合并进来,就知道位置了。

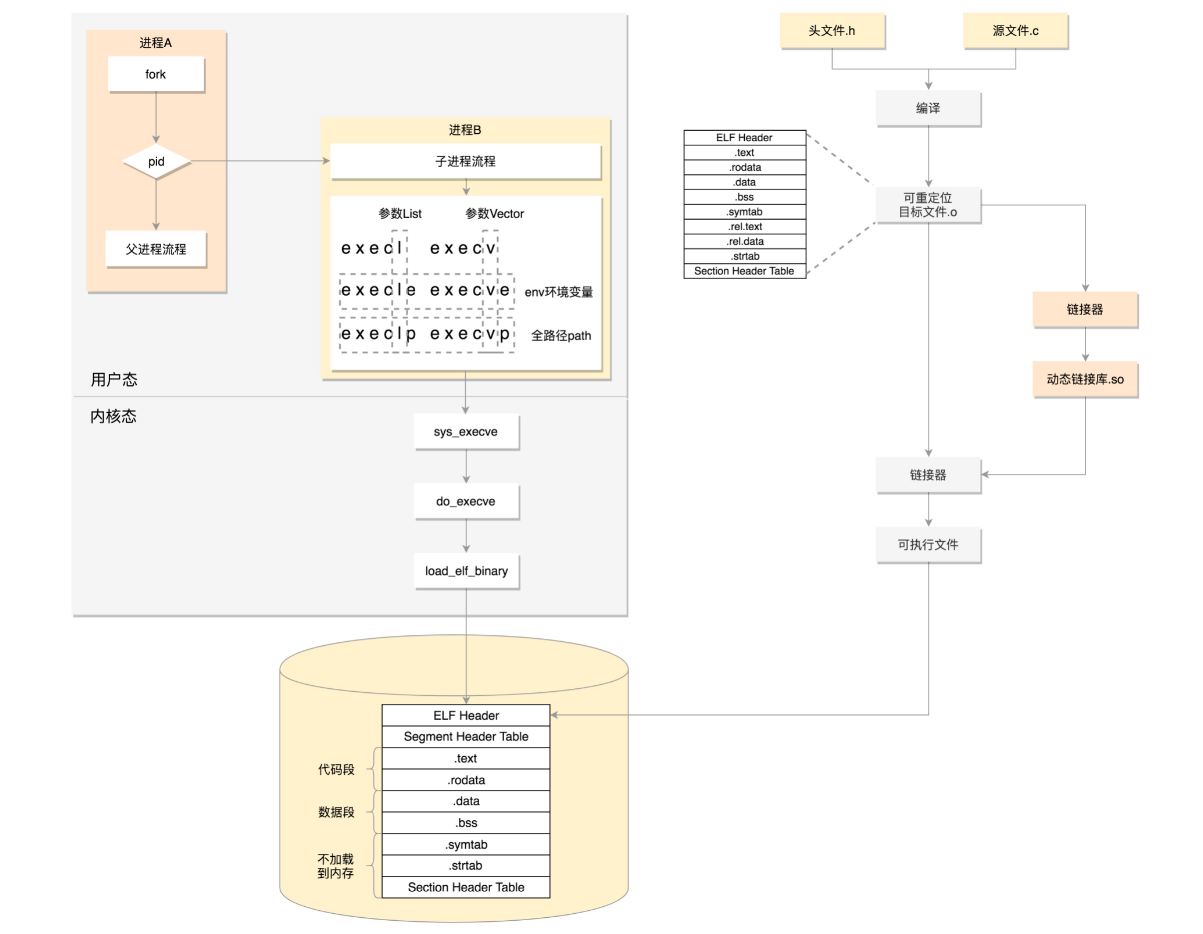
这个格式和.o 文件大致相似,还是分成一个个的 section,并且被节头表描述。只不过这些section 是多个.o 文件合并过的。但是这个时候,这个文件已经是马上就可以加载到内存里面执行的文件了,因而这些 section 被分成了需要加载到内存里面的代码段、数据段和不需要加载到内存里面的部分,将小的 section 合成了大的段 segment,并且在最前面加一个段头表(Segment Header Table)。
在代码里面的定义为 struct elf32_phdr和 struct elf64_phdr,这里面除了有对于段的描述之外,最重要的是 p_vaddr,这个是这个段加载到内存的虚拟地址。
在 ELF 头里面,有一项 e_entry,也是个虚拟地址,是这个程序运行的入口。
ELF-共享对象文件
静态库一旦被链接,代码和变量的section会被合并,所以运行时不依赖静态库文件,但是缺点就是,相同代码段被多个程序使用,在内存里会有多份,而且静态库更新需要重新编译。
因而就出现了另一种,动态链接库(Shared Libraries),不仅仅是一组对象文件的简单归档,而是多个对象文件的重新组合,可被多个程序共享。
gcc -shared -fPIC -o libdynamicprocess.so process.o
当一个动态链接库被链接到一个程序文件中的时候,最后的程序文件并不包括动态链接库中的代码,而仅仅包括对动态链接库的引用,并且不保存动态链接库的全路径,仅仅保存动态链接库的名称。
gcc -o dynamiccreateprocess createprocess.o -L. -ldynamicprocess
当运行这个程序的时候,首先寻找动态链接库,然后加载它。默认情况下,系统在 /lib 和/usr/lib 文件夹下寻找动态链接库。如果找不到就会报错,我们可以设定 LD_LIBRARY_PATH环境变量,程序运行时会在此环境变量指定的文件夹下寻找动态链接库。
# export LD_LIBRARY_PATH=.
# ./dynamiccreateprocess
# total 40
-rw-r--r--. 1 root root 1572 Oct 24 18:38 CentOS-Base.repo
......
动态链接库,就是ELF的第三种类型,共享对象文件(Shared Object)。
文件格式和上两种文件稍有不同,首先,多了一个.interp的 Segment,这里面是 ld-linux.so,这是动态链接器,也就是说,运行时的链接动作都是它做的。
另外,ELF文件中还多了两个section,一个是.plt,过程链接表(Procedure Linkage Table,PLT),一个是。got.plt,全局偏移量表(Global Offset Table,GOT)。
运行
在内核中,有linux_binfmt elf_format数据结构定义了加载 ELF 的方法,使用load_elf_binary加载二进制文件,该函数由do_execve调用,学过系统调用知道exec调用了do_execve函数。所以流程为
exec->do_execve->load_elf_binary
进程树
所有进程都是从父进程 fork 来的,祖宗进程就是init 进程。
系统启动之后,init 进程会启动很多的daemon 进程,为系统运行提供服务,然后就是启动 getty,让用户登录,登录后运行 shell,用户启动的进程都是通过 shell运行的,从而形成了一棵进程树。
我们可以通过 ps -ef命令查看当前系统启动的进程,我们会发现有三类进程。PID 1 的进程就是我们的init进程 systemd,PID 2 的进程是内核线程 kthreadd。
内核态进程的PPID祖先进程都是 2 号进程,用户态进程祖先进程都是 1 号进程,tty列是问号的,说明是后台服务进程。
进程数据结构
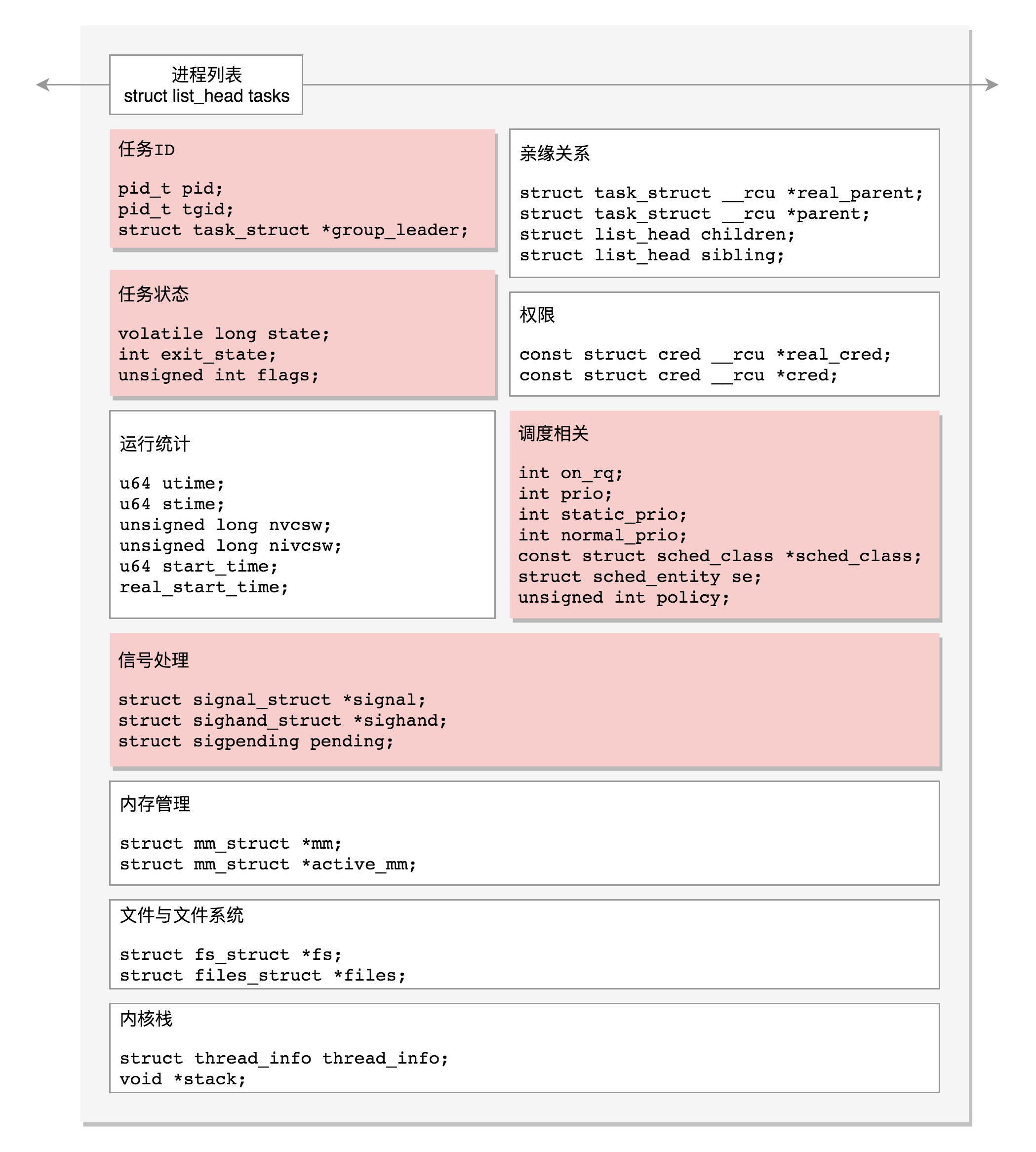
在 Linux 里面,无论是进程还是线程,到了内核里面,我们统一都叫任务(Task),由一个统一的结构task_struct进行管理。

每个任务应该包含的字段:
任务 ID
pid_t pid; #process id
pid_t tgid; #thread group ID
struct task_struct *group_leader;
为何要有这么多 ID,一个不够吗?
- 可以方便任务展示,比如在命令行中 ps 显示所有进程,只显示
pid_t pid,而不会把所有内部线程摊开展示,这样太碍眼。 - 方便下达命令,当我 kill 一个进程时,我们是对整个进程发送信号,但是有时候一些命令只需要对某个线程发送信号。
信号处理
/* Signal handlers: */
struct signal_struct *signal;
struct sighand_struct *sighand;
sigset_t blocked;
sigset_t real_blocked;
sigset_t saved_sigmask;
struct sigpending pending;
unsigned long sas_ss_sp;
size_t sas_ss_size;
unsigned int sas_ss_flags;
这里定义了哪些信号被阻塞暂不处理(blocked),哪些信号尚等待处理(pending),哪些信号正在通过信号处理函数进行处理(sighand)。处理的结果可以是忽略,可以是结束进程等等。
任务状态
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
int exit_state;
unsigned int flags;
state可取值定义如下
/* Used in tsk->state: */
#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define __TASK_STOPPED 4
#define __TASK_TRACED 8
/* Used in tsk->exit_state: */
#define EXIT_DEAD 16
#define EXIT_ZOMBIE 32
#define EXIT_TRACE (EXIT_ZOMBIE | EXIT_DEAD)
/* Used in tsk->state again: */
#define TASK_DEAD 64
#define TASK_WAKEKILL 128
#define TASK_WAKING 256
#define TASK_PARKED 512
#define TASK_NOLOAD 1024
#define TASK_NEW 2048
#define TASK_STATE_MAX 4096
可以发现 Linux 通过 bitset 方式设置状态,当前什么状态,哪一位就置 1。
进程调度
进程的状态切换往往涉及调度,下面这些字段都是用于调度的。
// 是否在运行队列上
int on_rq;
// 优先级
int prio;
int static_prio;
int normal_prio;
unsigned int rt_priority;
// 调度器类
const struct sched_class *sched_class;
// 调度实体
struct sched_entity se;
struct sched_rt_entity rt;
struct sched_dl_entity dl;
// 调度策略
unsigned int policy;
// 可以使用哪些 CPU
int nr_cpus_allowed;
cpumask_t cpus_allowed;
struct sched_info sched_info;
运行统计信息
u64 utime;// 用户态消耗的 CPU 时间
u64 stime;// 内核态消耗的 CPU 时间
unsigned long nvcsw;// 自愿 (voluntary) 上下文切换计数
unsigned long nivcsw;// 非自愿 (involuntary) 上下文切换计数
u64 start_time;// 进程启动时间,不包含睡眠时间
u64 real_start_time;// 进程启动时间,包含睡眠时间
进程亲缘关系
进程有棵进程树,所以有亲缘关系。
struct task_struct __rcu *real_parent; /* real parent process */
struct task_struct __rcu *parent; /* recipient of SIGCHLD, wait4() reports */
struct list_head children; /* list of my children */
struct list_head sibling; /* linkage in my parent's children list */
通常情况下,real_parent 和 parent 是一样的,但是也会有另外的情况存在。例如,bash 创建一个进程,那进程的 parent 和 real_parent 就都是 bash。如果在 bash 上使用 GDB 来 debug 一个进程,这个时候 GDB 是 real_parent,bash 是这个进程的 parent。
进程权限
/* Objective and real subjective task credentials (COW): */
const struct cred __rcu *real_cred;
/* Effective (overridable) subjective task credentials (COW): */
const struct cred __rcu
real_cred 就是说明谁能操作我这个进程,而 cred 就是说明我这个进程能够操作谁。
总结到一起,task_struct结构图如下,